In den nachfolgenden Ausführungen wird aus Gründen der besseren Lesbarkeit auf die Unterscheidung der Sprachformen divers, männlich und weiblich verzichtet. Es gelten sämtliche Personenbezeichnungen gleichermaßen für alle Geschlechter.
1 - Mit der FieldMApp starten
Alles Relevante für Nutzerinnen und Nutzer der FieldMApp.
Die Dokumentation ist noch im Aufbau.
1.1 - Installation
Die FieldMApp installieren.
Die Dokumentation ist noch im Aufbau.
Derzeit werden regelmäßig Feature-Builds für die Android-Plattform erstellt. Zukünftig sind zusätzlich auch Release-Builds für iOS geplant.
Hinweis
Eine APK-Datei ist ein Installationspaket für Android-Apps. Diese Anleitung gilt für die FieldMApp-APK, die außerhalb des Google Play Stores bereitgestellt wird.
1. APK-Datei auf das Tablet oder Smartphone übertragen
Lade die APK-Datei direkt über den Browser des Smartphones herunter.
2. Datei-Manager öffnen
Navigiere auf deinem Smartphone zur heruntergeladenen APK-Datei (z. B. im Download-Ordner).
Tippe auf die Datei (fm_app-realease.apk), um den Installationsprozess zu starten.
3. Installation erlauben
Beim ersten Versuch zeigt Android möglicherweise eine Warnung an:
„Installation aus unbekannten Quellen nicht erlaubt.“
Tippe auf „Einstellungen“ oder „Zulassen“, wenn du dazu aufgefordert wirst.
Aktiviere in den Sicherheits- oder App-Einstellungen die Option:
„Apps aus dieser Quelle zulassen“ oder „Unbekannte Apps installieren“
Kehre zurück und tippe erneut auf die APK-Datei.
4. Installation abschließen
Tippe auf „Installieren“
Warte, bis die App erfolgreich installiert wurde.
Danach erscheint die Schaltfläche „Öffnen“, um die App direkt zu starten.
Fertig!
Die App ist nun auf deinem Android-Gerät installiert und kann verwendet werden.
1.2 - Nutzeraccount/ Login
Einen FieldMApp-Account einrichten.
Die Dokumentation ist noch im Aufbau.
Die Anmeldung mit Nutzeraccount in der FieldMApp ermöglicht die Synchronisation von Feldaufnahmen mit dem FieldMApp-Server. Dies eröffnet zahlreiche Möglichkeiten zur Weiterverarbeitung und Integration der erhobenen Felddaten.
Funktionen des Logins
Durch die Anmeldung ist es möglich:
Feldaufnahmen zu exportieren in verschiedenen Dateiformaten:
CSV
Shapefile
GeoJSON
**Daten in GIS Systeme integrieren ** z. B. in QGIS über die OGC API Features Schinttstelle.
Diese Funktionen der FieldMApp ermöglichen die Nachbearbeitung, Integration in GIS-Prozessierungen und Team-Kollaboration im GIS-Umfeld.
Zugang und Benutzerkonten
Derzeit befindet sich die FieldMApp in einer wissenschaftlichen Erprobungsphase. Aus Gründen des Datenschutzes und zur Qualitätssicherung gilt:
Nutzerkonten können nicht frei erstellt werden.
Ein Account kann dennoch manuell vom FieldMApp-Team eingerichtet und freigegeben werden.
Bei Interesse bitte direkt über die E-Mail-Adresse `FieldMApp@dlr.de an das Projektteam wenden
Hinweis Ohne Login kann die FieldMApp weiterhin für lokal gespeicherte Daten-Erhebungen genutzt werden – eine Synchronisation mit dem FieldMApp-Server oder ein Export über OGC API Features ist dann jedoch nicht möglich.
Minderertragsflächen mit historischen Wetter- und Fernerkundungsprodukten abgleichen
Dieser Anwendungsfall zeigt die Integration verschiedener Datenprodukte im Map-Module, sowie im Reporting-Module der FieldMApp. Diese Integration ermöglicht eine fundierte, datenbasierte Entscheidungsunterstützung direkt innerhalb der App – beispielsweise durch die Analyse von Temperatur- und Niederschlagsverläufen während der Vegetationsperiode oder durch einen Überblick über die Entwicklung der Pflanzenvitalität zur Bewertung bereits durchgeführter Maßnahmen.
Sentinel 2 EVI Rasterdatenzeitreihe des Ehanced vegetation index auf Basis von Sentinel 2 Aufnahmen
DWD BodenfeuchtekarteRasterdatenzeitreihe (täglich) der Bodenfeuchte, bereitgestellt durch den deutschen Wetterdienst
OSM OpenStreetMap basierte Hintergrundkarte
Verwendete Erweiterung
Reporting Kartenerweiterung für monatliche Reports mit Wetter und Fernerkundungsparametern
Anwendungsfall: Minderertragsfläche aufnehmen und bearbeiten
Dieser Anwendungsfall zeigt, wie sich mit der FieldMApp Minderertragsflächen auf einem Feld schnell und präzise erfassen lassen. Die kartierten Flächen können direkt in der App bearbeitet und anschließend exportiert werden – etwa für die Weiterverarbeitung in QGIS. So fügt sich die App nahtlos in bestehende Datenanalyse-Workflows ein und beschleunigt die Feldauswertung.
2 - Komponenten der FieldMApp
Die Komponenten der FieldMApp.
Die Dokumentation ist noch im Aufbau.
2.1 - Importer
Importieren von externen Vektor- und Rasterdaten.
Die Dokumentation ist noch im Aufbau.
Das Import-Modul ermöglicht den Import von Vektor- und Rasterdaten in die FieldMApp. Einmal importiert, stehen die Daten allen Modulen der FieldMApp zur weiteren Verarbeitung zur Verfügung – zum Beispiel der Karte zur Visualisierung und Bearbeitung.
Datentypen
Derzeit unterstützt das Import-Modul den Import von Vektordaten im Format GeoJSON im Koordinatensystem WGS84. Außerdem können Rasterdaten über OGC-konforme WMS- und Tile-Services eingebunden werden. Weitere Formate sind für zukünftige Versionen geplant.
GeoJSON Importieren
Dieses Tutorial zeigt, wie eine externe GeoJSON-Datei (elbe_basin.geojson) in die FieldMApp importiert und im Kartenmodule visualisiert wird.
Schritt-für-Schritt-Anleitung
1. GeoJSON-Datei auswählen
Tippe auf die Schaltfläche + (rechts unten). Es öffnet sich ein Auswahlfenster, hier Geojson auswählen. Im Dateiexplorer zur gewünschten .geojson-Datei navigieren und auswählen.
2. Datei wird importiert
Nach der Auswahl wird die Datei automatisch in die Anwendung geladen und steht den Modulen der FieldMApp zur Verfügung.
3. Karte öffnen und Layer prüfen
Wechsle zum Modul „Karte“, um den importierten Layer zu visualisieren. Er sollte nun als eigenständiger Layer erscheinen und kann dort angezeigt, bearbeitet oder analysiert werden.
WMS Dienst einbinden
Dieses Tutorial zeigt, wie ein externe WMS-Dienst in die FieldMApp importiert und im Karten-Module visualisiert wird.
Schritt-für-Schritt-Anleitung
1. WMS als Quelle wählen
Tippe auf die Schaltfläche + (rechts unten). Es öffnet sich ein Auswahlfenster, hier WMS/WMTS/XYZ auswählen.
2. WMS-URL einfügen
Gib die URL des gewünschten WMS-Dienstes in das dafür vorgesehene Feld ein. Achte darauf, dass es sich um einen OGC-konformen Dienst handelt, sowie einen Name für den WMS-Layer.
3. Layer und Zusatzinformation
Gib den gewünschten Layer ein, welcher eingebunden werden soll. Eine Mehrfachnennung ist möglich als kommagetrennte Liste. Weiterhin wird die Version des WMS benötigt, üblicherweise 1.3.0. Optional können verfügbare Styles definiert werden. Unterstützt der Layer Transparenz kann diese durch den Schieberegeler aktiviert werden.
4. In der Karte prüfen
Öffne das Modul „Karte“, um die eingebundenen WMS-Layer anzuzeigen.
Tile-Service einbinden
Dieses Tutorial zeigt, wie ein externe Tile-Service in die FieldMApp importiert und im Karten-Module visualisiert wird.
Schritt-für-Schritt-Anleitung
1. Tile-Service als Quelle wählen
Tippe auf die Schaltfläche + (rechts unten). Es öffnet sich ein Auswahlfenster, hier WMS/WMTS/XYZ auswählen. Im neuen Pop-up-Fenster den Schieberegeler TMS aktivieren.
2. Service-URL einfügen
Gib die URL des gewünschten Tile-Service in das dafür vorgesehene Feld ein, sowie einen Name für den Tile-Layer.
3. Zusatzinformation
Weiterhin kann im Feld Service Attributation der Urheber des Dienstes hinterlegt werden. Durch das Feld MapKey-URL kann eine externe Legendengrafik geladen werden.
4. In der Karte prüfen
Öffne das Modul „Karte“, um die eingebundenen Tile-Layer anzuzeigen.
Importierte Daten entfernen
Dieses Tutorial zeigt, wie die zuvor importierte GeoJSON-Datei (elbe_basin.geojson) aus der FieldMApp entfernt wird.
Schritt-für-Schritt-Anleitung
1. GeoJSON-Datei auswählen
Finde die zu löschende Datei/Quelle aus der Liste importierter Datenquellen im Importer-Module
2. Quelle entfernen
Durch einen long-press auf die ausgewählte Quelle öffnet sich ein Lösch-Dialogfenster, in diesem muss die zu löschende Quelle bestätigt werden, wird dies bestätigt wird die Datenquelle entfernt.
2.2 - Sensoren
Verfügbare Sensoranbindungen in der FieldMApp.
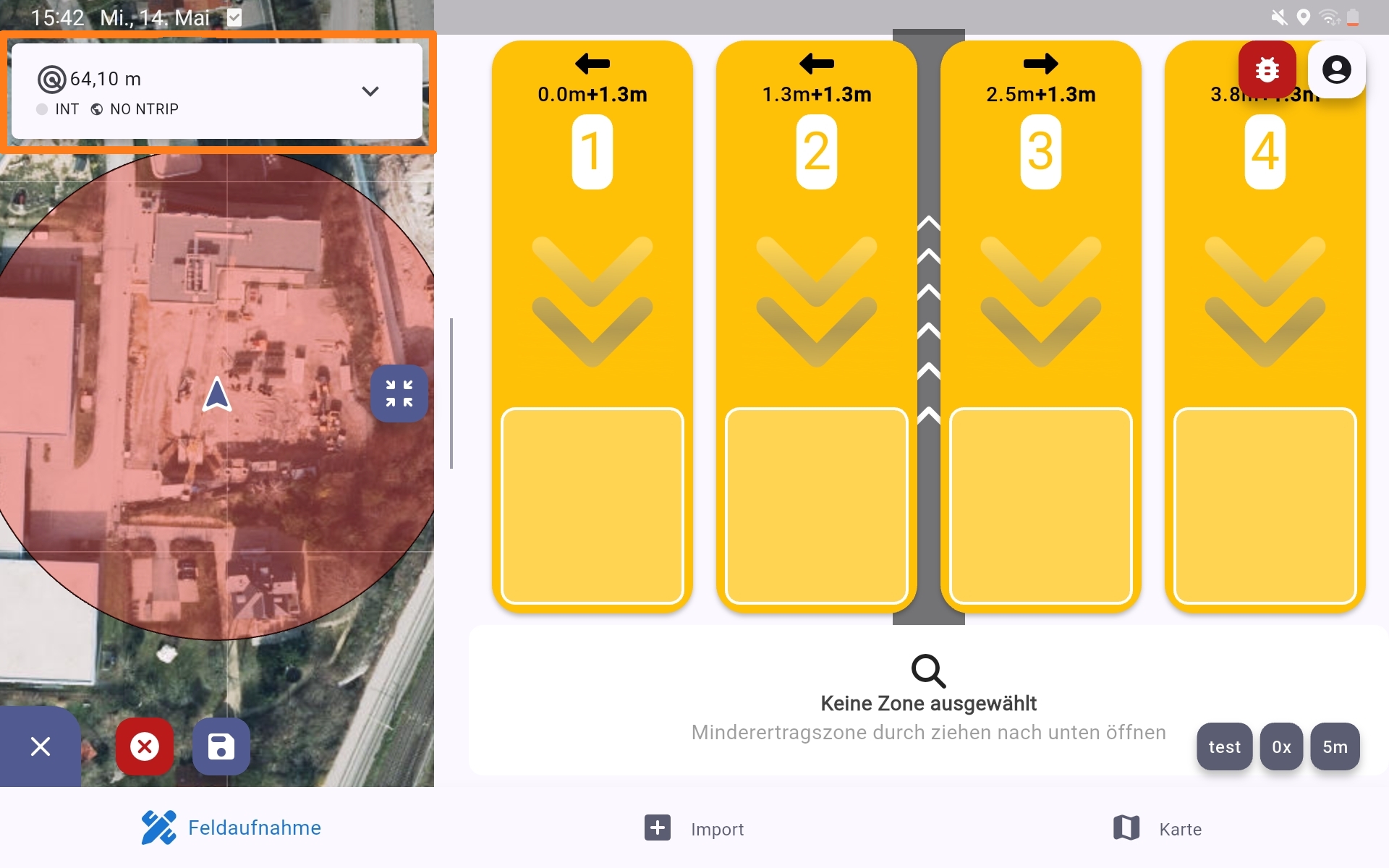
Derzeit sind zwei verschiedene Sensoranbindungen in der FieldMapp verfügbar. Der interne GNSS Sensor des Mobilgeräts und ein externer DGNSS Empfänger ermöglichen die Positionsbestimmung. Alle Einstellungen und Informationen zur Positionsbestimmung befinden sich in einem Bedienelement zusammengefasst. Dieses Bedienelement ist in dem Modul Feldaufnahme und Karte verfügbar.
Das Bedienelement Positionsbestimmung ist mit einem orangefarbenem Rahmen markiert. Die obenstehende Zahl in dem Bedienelement zeigt die derzeitige geschätzte Ungenauigkeit der Position. Unten links informiert ein farbiger Kreis (in dem Fall grau für die Verwendung des internen GNSS Empfängers) mit zugehörigen Text über die Qualität der Positionsbestimmung. Der Text unten rechts gibt Informationen über die verwendeten NTRIP-Korrekturdaten.
In Zukunft sind weitere Sensoranbindungen geplant.
2.2.1 - Interne Sensoren der FieldMApp
Verwendung des GNSS Empfängers des Tablets.
Es kann der Positionsempfänger genutzt werden, welcher in das Tablet integriert ist. Somit ist eine einfache Möglichkeit gegeben die Funktionalität der FieldMApp zu prüfen ohne zusätzliche Hardware zu nutzen. Bei Verwendung in einer Fahrzeugkabine können Abweichungen von mehr als 20 Meter auftreten.
2.2.2 - Externe Sensoren der FieldMApp
Verwendung eines externen GNSS Empfängers.
DGNSS
Hinweis DGNSS (Differentielles GNSS) ist eine Technologie, um eine höhere Positionsgenauigkeit zu erzielen. Dabei werden zusätzlich zu den GNSS-Signalen (GNSS Global Navigation Satellite System, ist ein Sammelbegriff für Satellitennavigationssysteme) noch differenzielle Korrekturdaten über das Internet empfangen. Bei der in der FieldMApp verwendeten RTK Korrektur erfolgt die Anwendung der Korrekturdaten in Echtzeit.
Es ist empfohlen, einen externen GNSS Empfänger mit externen Korrekturdaten zu verwenden um eine höhere Positionsgenauigkeit zu erzielen. Derzeit ist ein über USB verbundener u-blox F9P Empfänger unterstützt. Es kann derzeit ausschließlich auf Android-Geräten eingesetzt werden.
Im Folgenden werden die benötigten Schritte beschrieben.
Empfänger verbinden
Der externe Empfänger muss mit einem USB-C zu USB-A Adapterkabel mit dem Tablet verbunden werden. Die Antenne muss mus mit dem Empfänger verbunden werden und mit freier Sicht auf den Himmel platziert werden.
Android Aufforderung zustimmen
Bei Verbinden des Empfängers erscheint eine Aufforderung auf dem Bildschirm.
Aufforderung welcher bei Verbinden des GNSS-Empfängers erscheint
Internet Verbindung herstellen
Um die NTRIP Korrekturdaten zu empfangen muss eine Internetverbindung auf dem Tablet verfügbar sein.
Auswählen der NTRIP Korrekturdaten
Es muss die korrekte Quelle für NTRIP-Korrekturdaten ausgewählt werden. Dazu das Bedienelement für die Positionsbestimmung ausklappen. Unter NTRIP-Korrektur muss das derzeitige Bundesland gewählt werden. Für einige Bundesländer werden personalisierte Zugangsdaten benötigt, welche durch Klick auf den Button nebem dem Namen des Bundeslandes eingegeben werden können. Für Bundesländer in denen der Zugang frei verfügbar ist, wie etwa Thüringen reicht ein Auswählen aus.
Aktivieren
Durch Umlegen des Schalters RTK aktivieren wird die Verwendung des externen DGNSS-Exmpfängers aktiviert. Es kann nun etwa eine Minute dauern bis eine Positionsbestimmung möglich ist. Es ist durch erneutes Bedienen des Schalters jederzeit ein Wechsel zum internen Empfänger möglich.
Hinweis Die Qualitätsanzeige der Positionsbestimmung sollte von Rot (NONE) auf schließlich Blau (FLOAT) oder besser Grün (FIX) umschwenken um, was eine zuverlässige Positionsbestimmung signalisiert.
Statusinformationen
In dem Bedienelement zur Positionsbestimmung können verschiedene Statusinformationen über die Verbindung angezeigt werden.
Die Karten- und GIS-Funktionalitäten der FieldMApp.
Die Dokumentation ist noch im Aufbau.
Das Modul “Karte” ist die geografische Informationssystem-(GIS-)Komponente der FieldMApp und bietet Werkzeuge zur Visualisierung, Bearbeitung und Erstellung räumlicher Daten im Feld. Mit einer intuitiven, für mobile Geräte optimierten Benutzeroberfläche ermöglicht dieses Modul Anwendern, mit verschiedenen Geodatenformaten zu arbeiten, ihre Position zu verfolgen und räumliche Analyseaufgaben direkt auf ihrem mobilen Gerät durchzuführen.
Hauptfunktionen
Multi-Layer-Visualisierung - Darstellung verschiedener Datenformate wie Tile-Layer (OSM), Webdienste (WMS) und Vektordaten (GeoJSON)
Echtzeit-Positionsverfolgung - Anzeige des aktuellen Standorts samt Genauigkeitsinformationen und automatischer Bewegungsverfolgung
Ortssuche - Finden von Orten und Adressen über OpenStreetMap-basierte Suchfunktionalität
Layer mit Zeitsteuerung - Arbeit mit Zeitreihendaten wie Wetterradardaten mit intuitiver Steuerung
Egal ob Felddaten gesammelt, in unbekanntem Gelände navigiert oder räumliche Muster vor Ort analysiert werden sollen – das Karten-Modul bietet alle wesentlichen GIS-Funktionen, optimiert für die mobile Feldarbeit.
Map-Erweiterungen:
Reporting Kartenerweiterung für monatliche Reports mit Wetter- und Fernerkundungsparametern
Geodaten visualisieren
Dieses Tutorial zeigt, wie Geodaten in das GIS-Modul der FieldMApp geladen und visualisiert werden können. Im Beispiel werden drei Layer eingebunden:
OpenStreetMap (OSM) – als Hintergrundkarte zur Orientierung.
DWD-Niederschlagsradar (WMS) – aktuelle Wetterdaten mit Zeitsteuerung.
Elbeeinzugsgebiet (GeoJSON) – thematischer Vektorlayer mit Metadaten.
Schritt-für-Schritt-Anleitung
1. Start des GIS-Moduls
Öffne die FieldMApp und tippe in der Navigationsleiste Karte an, um das GIS-Modul zu öffnen.
Tippe auf das den Button Layer hinzufügen, um das gleichnamige Menü zu öffnen. (Symbol: Stapel).
Wähle aus der Liste OpenStreetMap aus.
Die Hintergrundkarte erscheint und ermöglicht eine räumliche Orientierung.
3. Niederschlagsradar hinzufügen (DWD, WMS)
Tippe auf das den Button Layer hinzufügen, um das gleichnamige Menü zu öffnen.
Wähle aus der Liste DWD Niederschlagsradar aus.
Im Menü des Layers erscheint die Option zur Zeitsteuerung, mit der Zeitpunkte jeweils durch Antippen aus der Liste ausgewählt werden können.
4. GeoJSON laden: Elbeeinzugsgebiet
Tippe auf das den Button Layer hinzufügen, um das gleichnamige Menü zu öffnen.
Wähle aus der Liste den Vektordatensatz elbe_basin.geojson aus.
Die Geometrien (Punkte, Polyinien oder Flächen) des Vektordatensatzes werden in der Kartenansicht dargestellt.
Durch Antippen einzelner Geometrien werden die zugehörigen Metadaten (z. B. Name, Fläche, ID) angezeigt.
5. Interaktive Funktionen nutzen
Zoomen, Verschieben, Layer-Reihenfolge ändern.
Informationen zu Layern anzeigen lassen.
Layer (de)aktivieren über die Sidebar.
Geodaten bearbeiten
Dieses Tutorial zeigt die Bearbeitung eines Vektordatensatzes. Hierfür wird der Vektordatensatz elbe_basin.geojson geladen und auf Basis des OpenStreetMap Hintergrund-Layers bearbeitet.
Schritt-für-Schritt-Anleitung
1. Laden des GeoJSON-Datensatzes und des Hintergrundlayers
Auf die Geometrie in der Kartenansicht tippen, die bearbeitet werden soll, um dieses auszuwählen (hier z. B. eine Polylinie, die einen Flussabschnitt abbildet).
Die ausgewählte Geometrie gedrückt halten (Long Press), um den Bearbeitungsmodus zu starten.
Die Geometrie wird dadurch editierbar (dh., es können z. B. Eckpunkte verschoben werden).
3. Änderungen vornehmen
Verschiebe bestehende Eckpunkte (Punkte mit quadartischem Rahmen) oder füge neue Eckpunkte zur Geometrie hinzu, um diese wie gewünscht umzuformen.
Bestätige die Änderungen durch Antippen von Speichern oder das entsprechende Symbol in der Werkzeugleiste (rechts).
Neue Geodaten erstellen
Dieses Tutorial zeigt das Hinzufügen eines Objektes zu einem existierenden Vektordatensatz. Als Beispieldatensatz wird hierfür der Vektordatensatz elbe_basin.geojson geladen und mithilfe des OpenStreetMap Hintergrund-Layers bearbeitet.
Schritt-für-Schritt-Anleitung
1. Laden des GeoJSON-Datensatzes und des Hintergrundlayers
Gewünschte Geometrieart in der Werkzeugleiste (rechts) auswählen mögliche Wahl zwischen Polyline, Polygon oder Punkt
3. Änderungen vornehmen
Verschiebe Eckpunkte oder forme die Geometrie wie gewünscht um.
Bestätige die Änderungen durch einen Klick auf „Speichern“ oder das entsprechende Symbol in der Werkzeugleiste (rechts)
gewünschten Layer in welchem das neue Feature gespeichert werden soll auswählen
Positionanzeigen und -folgen
In dieser Anleitung zeigen wir, wie du deine aktuelle GPS-Position im GIS-Modul anzeigen und der Bewegung automatisch folgen lassen kannst. Dies ist besonders hilfreich bei Navigation, Geländeaufnahmen oder Außeneinsätzen.
Schritt-für-Schritt-Anleitung
1. Anzeige der aktuellen Position aktivieren
Tippe auf das GNSS-Symbol (Fadenkreuz mit Punkt) in der Kartenansicht.
Deine aktuelle Position wird auf der Karte als blauer Pfeil angezeigt.
Der aktuelle GNSS-Genauigkeit wird in der Info-Box unterhalb des Buttons dargestellt und als Fehlerkreis in der Karte
2. Follow-Me-Modus aktivieren
Tippe auf das GNSS-Symbol, um den Follow-Me-Modus zu aktivieren.
Die Karte zentriert sich automatisch auf deine Position und folgt deinen Bewegungen.
🔁 Der Modus bleibt aktiv, bis du den GNSS-Fokus deaktivierst.
3. Follow-Me-Modus aktivieren
Tippe auf das GPS-Verlauf-Symbol (Kreissymbol) um die Ansicht der letzten 100 GNSS Positionen darzustellen.
4. GPS deaktivieren (optional)
Durch weiteres Tippen auf das GPS-Symbol kannst du den Follow-Me-Modus beenden.
Die Karte bleibt dann an der letzten Position stehen.
Ortssuche
In diesem Beispiel wird die OSM basierte Ortssuche gezeigt.
Schritt-für-Schritt-Anleitung
1. Zugriff auf das Suchfeld
Tippe auf das Suchsymbol 🔍 oder das Eingabefeld am oberen Bildschirmrand.
Das Suchfeld öffnet sich und wartet auf deine Eingabe.
2. Ort oder Adresse eingeben
Gib den gesuchten Begriff ein, z. B.:
Jena
München, Marienplatz
Jena DLR
Während der Eingabe werden Vorschläge basierend auf OpenStreetMap-Daten angezeigt.
3. Treffer auswählen
Wähle den passenden Eintrag aus der Liste.
Die Karte zoomt automatisch zum entsprechenden Ort.
Ein Marker kennzeichnet die Zielposition.
2.4 - Feldaufnahme
Das Feldaufnahme-Modul ermöglicht das Kartieren von Minderetragsflächen.
2.4.1 - Eine Minderertragsfläche kartieren
Benutzerdokumentation für das Kartieren von Flächeninformationen wie z.B. Minderertragsflächen.
Ein häufiger Anwendungsfall für dieses Modul ist:
Es sollen digitale Karten von Minderertragsflächen und deren Ursachen erstellt werden
Ich fahre über das Feld und markiere Beginn und Ende von Minderertragsflächen links und rechts meiner Fahrspur
Ich gebe Ursache und Stärke der Minderertragsfläche an
Das Minderertragsflächenmodul in der FieldMApp auswählen
In der unteren Leiste den Tab Feldaufnahme anklicken.
Die Aufnahmeoptionen anpassen
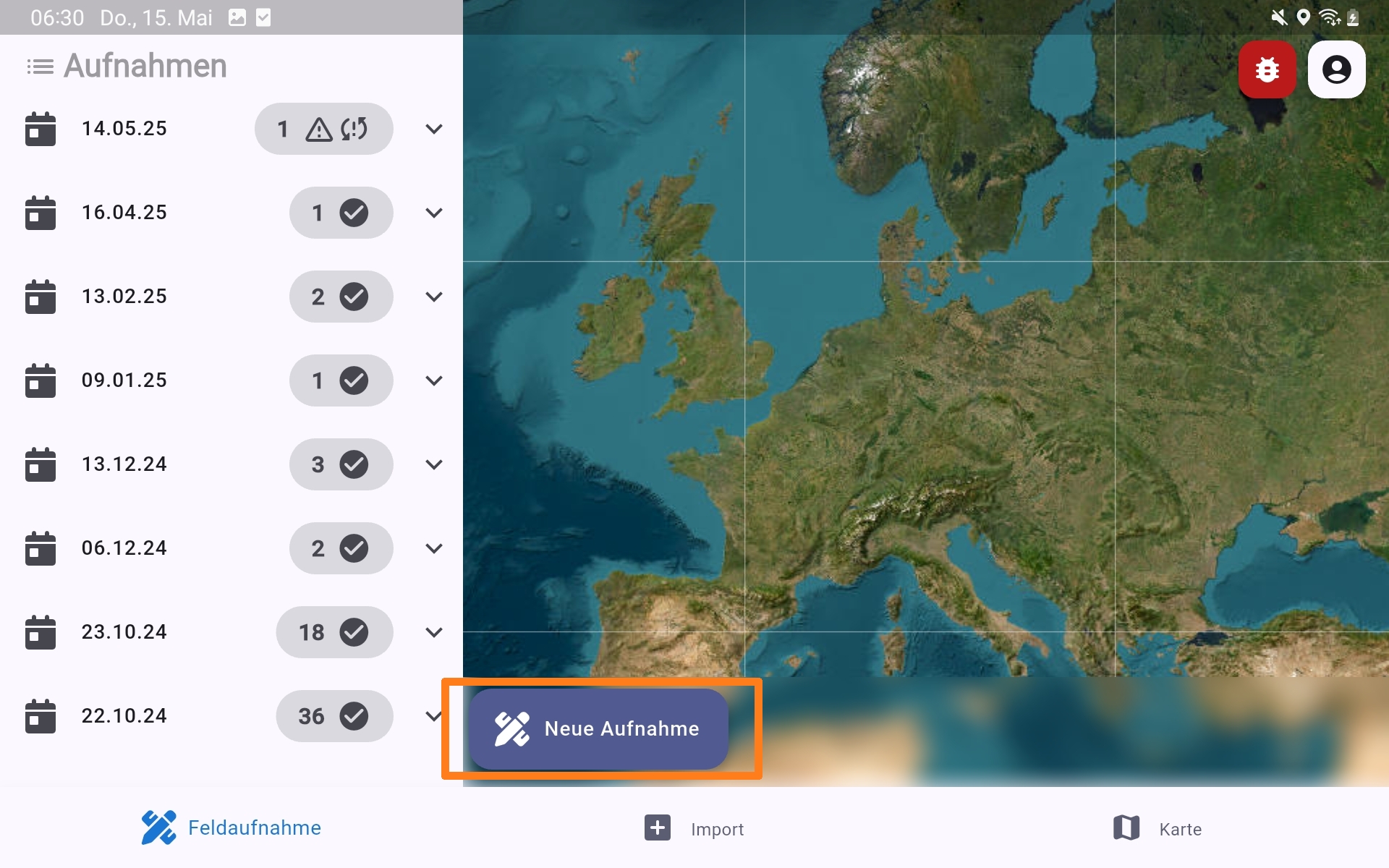
Neue Feldaufnahme
Durch einen Klick auf den Button Neue Aufnahme starten! kann eine neue Feldaufnahme gestartet werden und das Formular zur Eingabe der Aufnahmeoptionen erscheint.
Startseite des Feldaufnahme Moduls
Formular zur Eingabe der Aufnahmeoptionen
Name der Aufnahme
Name der Feldaufnahme unter der die vorgenommenen Einstellungen sowie die spätere Aufnahme gespeichert werden und bei Bedarf wieder abgerufen werden können.
Autor
Name der kartierenden Person.
Gesamtbreite (m)
Eingabe der gesamten Bearbeitungsbreite in Metern.
Anzahl der Zonen (einseitig)
Die Arbeitsbreite links und rechts der Fahrspur wird in gleich große Zonen unterteilt, um eine strukturierte Kartierung zu ermöglichen. Dabei kann jede Seite in 1 bis 5 Zonen aufgeteilt werden. Die Anzahl der Zonen bestimmt die Breite der einzelnen Streifen. Zum Beispiel ergibt eine Gesamtbreite von 30 m bei 3 Zonen pro Seite insgesamt 6 Streifen mit einer Breite von jeweils 5 m.
Abstand zur Aufnahme
Distanz zwischen Fahrer und GNSS-Antenne in Metern. Durch diese Option wird bei der Feldaufnahme ein Offset hinzugefügt, so dass ein präzises Aufnehmen durch den Fahrer möglich ist, selbst wenn die Antenne vor oder hinter dem Fahrer positioniert ist.
Positive Zahl: Die Antenne ist vor dem Fahrer.
Negative Zahl: Die Antenne ist hinter dem Fahrer.
Foto: Maximilian Enderling, Bearbeitung: Tim Surber Diese Grafik zeigt die Bedeutung der Option Gesamtbreite, einen positiven Abstand zur Aufnahme und eine Anzahl der Zonen (einseitig) von zwei
Auswahl von Minderertragsursachen
Es kann eine voreingestellte Auswahl an möglichen Minderertragsursachen selektiert werden, oder eine neue Liste erstellt werden. Durch einen Klick auf das + kann ein Name für die Sammlung von Gründen vergeben werden und die Gründe (durch Kommas getrennt) eingetragen werden.
Abschließen der Aufnahmeoptioneneingabe
Um die Eingaben zu bestätigen, muss das Speicherysmbol in der unteren rechten Ecke angeklickt werden. Dies startet die Feldaufnahme. Mit einem Klick auf das Symbol mit dem Kreuz hingegen wird das Erstellen einer neuen Feldaufnahme abgebrochen.
Vorhandene Feldaufnahme als Vorlage verwenden
Bei einer wiederholten Kartierung kann Zeit gespart werden, in dem auf der rechten Seite eine zuvor erstellte Feldaufnahme als Vorlage verwendet wird. Es werden die Aufnahmeoptionen der Vorlage übernommen in die Optionsfelder übernommen. In der Konfigurationsansicht erscheinen die Eingaben der vorherigen Feldaufnahme, wobei der Name der Feldaufnahme neu vergeben werden muss.
Während der Aufnahme
Minderertragsflächen werden durch eine oder mehrere Zonen begrenzt. Zonen unterteilen die Breite der Fahrspur. Einer Zone muss ein Grund mit zugehöriger Intensität zugewiesen werden.
Der Anfang einer Minderertragsfläche in einer Zone oder mehreren Zonen wird durch nach unten Wischen über die betreffende(n) Nummer(n) der Zone(n) festgelegt (Abb. 5). Die Möglichkeit zur Eingabe des Grundes und verbundenen Intensität wird damit automatisch freigeschaltet (Abb. 6). Aktivierte Zonen sind in einer hellgrünen Farbe hinterlegt.
Eigenschaften der Minderertragsflächen
Grund
Durch klicken auf die entsprechende Ursache und Schweregrad können diese Informationen der zuletzt aktivierten Zone, welche in einem helleren grün hinterlegt ist, hinzugefügt werden. Nach erfolgreicher Eingabe erscheint eine schwarze Umrandung des zuletzt hinzugefügten Grundes, sowie ein schwarzer Haken beim entsprechenden Schweregrad
Hinweis Alternativ können Grund und Intensität auch zu allen weiteren aktiven oder nicht aktivierten Zonen per Drag and Drop gezogen werden.
Intensität
Für jeden Grund stehen drei Intensitäten zur Verfügung. Der sandige Farbton bedeutet geringe Intensität, der orange Farbton mittlere Intensität und der rote Farbton hohe Intensität.
Ende von Minderertragsflächen
Das Ende einer Minderertragsfläche wird durch ein Hochwischen über die entsprechende Zonennummer oder durch ein Doppeltipp auf die entsprechende Zonennummer erreicht.
Hinweis Der Beginn und das Ende der Zone sollte möglichst genau in dem Moment markiert wrden, in dem der Fahrer die Begrenzungen der Minderertragsfläche überfährt.
Darstellungsoptionen
Durch klicken auf den Button mit dem Kartensymbol in der rechten oder linken Ecke eine Karte angezeigt werden, welche die aktuelle Position und die bereits erfassten Flächen anzeigt. Die Größe der Karte kann durch bewegen des Anfassers angepasst werden.
Hinweis Durch Verändern der Position und Größe kann die Aufnahme für eine Einhandbedienung des Tablets optimiert werden.
Beenden der Feldaufnahme
Speichern
Ein Tippen auf den Speicherbutton unten links beendet und speichert die Aufnahme.
Verwerfen
Das rote Kreuz neben dem Speicherbutton dient zum Abbrechen und Löschen der Aufnahme. In diesem Fall wird kein Ergebnis erstellt, und alle aufgenommenen potenziellen Minderertragsflächen werden nicht verworfen.
2.4.2 - Hinweise
Leitfaden zur bewährten Datenerfassung.
Für ein Feld sollte die Erfassung der Minderertragsflächen mehrmals unabhängig voneinander erfolgen. Auf diese Weise soll sichergestellt werden, dass
alle potentiellen Minderertragsstandorte erfasst werden, auch wenn deren Ausprägung nur unter unterschiedlichen Witterungsbedingungen entsteht.
die größtmögliche Ausdehnung der potentiellen Minderertragsfläche kartiert wird sowie die üblicherweise auftretende Varianz in der Ausdehnung.
anhand der Analyse der Häufigkeitsverteilung einer erfassten Eigenschaft (wie z.B. der Minderertragsursache) eventuell erfolgte Fehlangaben ausgeschlossen werden können.
Sollte lokal eine exakte Erfassung der Problemstandorte während einer Befahrung nicht möglich sein, z.B. auf Grund einer hohen standörtlichen Heterogenität, empfehlen wir die Erfassung auf den Teil der Problemstandorte zu beschränken, die bei Erhalt der Qualität leistbar ist. Die verbleibenden Problemstandorte können bei späteren Befahrungen ergänzt werden.
2.4.3 - Unsicherheits- und Genauigkeitsangaben
Untersuchung über erwartbare Genauigkeit.
Im Rahmen einer Untersuchung wurden 150 Minderertragsflächen von 5 verschiedenen Personen mit Hilfe des Tastenfelds der FieldMApp-Fahrtansicht erfasst (Stichprobenumfang N = 750). Das Fahrzeug, in dem sich die kartierenden Personen während der Datenerhebung befanden, wurde mit einer konstanten Geschwindigkeit von 15 km/h bewegt. Die Minderertragsflächen waren bei der Untersuchung so verteilt, dass ein sehr breites Spektrum von Eingabebefehlen abgedeckt wurde. Die Eingabebefehle reichten von
einer separiert in einer Zone liegenden Minderertragsfläche, über
direkt aneinander grenzende Minderertragsflächen unterschiedlicher Ursachen, die sich jeweils über mehrere Zonen erstreckten, bis hin zu
direkt aneinander grenzende Minderertragsflächen unterschiedlicher Ursachen, die sich jeweils über mehrere Zonen erstreckten und auf gleicher Höhe liegend links und rechts der Fahrspur unterschiedliche Ursachen aufwiesen.
Eine parallele Bedienung von anderen Steuerelementen am Fahrzeug erfolgte nicht. Unter diesen Gegebenheiten wurden folgende zu erwartenden minimalen Unsicherheiten bzw. maximalen Genauigkeiten abgeschätzt:
Kenngröße
Abgeschätzter Wert
Zu erwartende Ausfallrate an Angaben (bezogen auf N)
0,9%
Anteil korrekter Eingabebefehle (bezogen auf N)
96,1%
Anteil korrekt eingegebener Zonennummern (bezogen auf N)
98,7%
Anteil korrekt eingegebener Minderertragsursachen (bezogen auf N)
96,5%
Median des richtungsabhängigen Versatzes zwischen dem Anfang der Minderertragsfläche und dem Start der Datenerfassung
+4,9 m
Mittelwert des richtungsabhängigen Versatzes zwischen dem Anfang der Minderertragsfläche und dem Start der Datenerfassung
+6,9 m
Standardabweichung als Streumaß für den Versatz zwischen dem Anfang der Minderertragsfläche und dem Start der Datenerfassung
11,25 m
2.5 - Vitalitätsdefizitlayer
Satellitenbildprodukt zur Beurteilung der aktuellen Pflanzenentwicklung auf Feldern
Hintergrund
Ein Vitalitätsdefizit-Layer ist ein fernerkundungsbasierter Datenlayer, der in der FieldMApp als zusätzliche Informations- und Orientierungshilfe dargestellt werden kann. Der Vitalitätsdefizit-Layer ermöglicht es, für vergangene Jahre, die Vitalität des Bestandes auf dem betrachteten Feld mit dem durchschnittlichen Zustand anderer Felder der gleichen Kulturart im selben Naturraum zu vergleichen. Der Layer basiert auf multispektralen Satellitendaten. Es handelt sich um einen pixelbasierten Datensatz mit 10m Auflösung, so dass Unterschiede innerhalb eines Feldes sichtbar werden können.
Daten und Methodik
Satellitendaten
Die Vitalitätsdefizit-Layer basieren auf Multispektraldaten der Erdbeobachtungsmission Sentinel-2. Diese Mission beinhaltet aktuell zwei identische Satelliten, Sentinel-2A und Sentinel-2B, die in einer sonnensynchronen Umlaufbahn operieren. Das auf den Satelliten befindliche Multi-Spectral-Instrument (MSI) liefert hochauflösende multispektrale Bilder in 13 Wellenlängenbereichen. Die Bilddaten enthalten wichtige Informationen zum Pflanzenzustand und können somit beim Monitoring der Vitalität von Pflanzenbeständen, bei Vegetationskartierungen und ähnlichen Anwendungen unterstützen. Die Bilddaten werden mit einer Wiederholungsrate von etwa 5 Tagen aufgenommen. Im Falle von Bewölkung kann die Landoberfläche allerdings nicht beobachtet werden, so dass hier zeitliche Lücken von mehr als 5 Tagen entstehen können.
Erzeugung von Vegetationsindex-Zeitreihen
Für die Erzeugung der Vitalitätsdefizit-Layer werden die Sentinel-Daten zunächst mit dem Sen2Cor Prozessor (Main-Knor et al. 2017) atmosphärisch korrigiert. Die Wolkenmaskierung erfolgt mithilfe des Scene-Classification-Layers (SCL, Main-Knor et al. 2017). Es wird ein Datenstapel der Sentinel-2 Aufnahmen erstellt und Wolkenlücken werden linear interpoliert. Die Zeitreihen von März bis Oktober werden schließlich mit dem Savitzky-Golay-Filter (Savitzky & Golay 1964) geglättet. Anschließend werden für 5-Tages-Schritte zwei Vegetationsindizes berechnet, welche mit der Dichte, Grünheit und Vitalität von Vegetationsbeständen korrelieren: der Normalized Difference Vegetation Index (NDVI; Abb. 1) und der Enhanced Vegetation Index (EVI). Diese werden wie folgt berechnet:
Dabei steht ROT und NIR für die ermittelte Reflektanz der Wellenlängenbereiche, die Rot beziehungsweise nahes Infrarot abdecken.
Abbildung 1: Kartenausschnitt für Felder bei Demmin für einen NDVI Layer am 28.04.2024
Berechnung der durchschnittlichen Vitalität und der Vitalitätsdefizit-Layer
Geodaten zur landwirtschaftlichen Nutzung - aus Daten des IACS (Integrated Administration and Control System) oder aus satellitenbasierten Feldfruchtkartierungen - werden zu 17 Feldfruchtklassen aggregiert. Diese Klassen umfassen Winterweizen, Wintergerste, Winterroggen, sonstige Wintergetreide, Sommerweizen, Sommerroggen, Sommerhafer, Mais, Leguminosen, Kartoffeln, Zuckerrübe, Winterraps, Klee/Luzerne, Ackergras, Dauergrünland, Wein und Obstbäume, wobei in jeder Klasse zwischen konventionellem und biologischem Anbau unterschieden wird. Im Anschluss werden innerhalb der Naturräume (BfN 2011) pro Feldfrucht der Mittelwert und die Standardabweichung der beiden Vegetationsindizes für jeden 5-Tages-Schritt berechnet. Schließlich werden von den aufbereiteten 5-tägigen Vegetationsindex-Zeitreihen die für den gegebenen Naturraum, die gegebene Feldfrucht und den gegebenen Zeitschritt passenden Mittelwerte abgezogen. Der resultierende Datensatz wird als Vitalitätsdefizit-Layer bezeichnet.
Interpretation der Vitalitätsdefizit-Layer
Abbildung 2 zeigt den Vitalitätsdefizitlayer für den 28.04.2024 für Felder bei Demmin im Naturraum Nordostmecklenburgischen Tiefland. In den blassgelb eingefärbten Kartenbereichen entspricht die Vitalität des Bestandes zu diesem Zeitpunkt in etwa dem Durchschnitt aller Felder in diesem Naturraum – die Werte sind dabei auf die jeweilige Feldfrucht angepasst. Dort, wo Bereiche des Feldes Orange- und Rottöne aufweisen (z.B. für das Rapsfeld in der Kartenmitte) ist die Vitalität geringer und dort, wo Grün- und Blautöne zu sehen sind (z.B. im Winterweizenfeld darunter) ist die Vitalität höher als dies im Mittel für alle anderen Raps- bzw. Winterweizen-Felder des Naturraums beobachtet wurde. Besonders rote Bereiche können auf Minderertragsflächen (eingekreist in Abb. 2) hindeuten. Im Unterschied zu der einfachen Darstellung des Vegetationsindizes (vgl. Abb. 1) erhält man mit den Vitalitätsdefizitlayern eine zusätzliche Information über die Pflanzenvitalität durch den räumlichen Vergleich. Über einen zweiten Kanal im Vitalitätsdefizitlayer kann man über die feldfruchtspezifische Standardabweichung (vgl. Abb. 3) die Farbskalierung und -darstellung anpassen (z.B. durch z-Standardisierung). Somit bleiben die Vitalitätsdefizite auch für unterschiedliche Feldfrüchte vergleichbar.
Abbildung 2: Kartenausschnitt für Felder bei Demmin für einen Vitalitätsdefizitlayer am 28.04.2024. Schwarze Bereiche sind nicht-landwirtschaftlich genutzte Flächen (OSM 2025)
Abbildung 3: Kartenausschnitt für Felder bei Demmin für die feldfruchtspezifische Standardabweichung des NDVI am 28.04.2024. Schwarze Bereiche sind nicht-landwirtschaftlich genutzte Flächen (OSM 2025).
Main-Knorn M., B.Pflug, J. Louis, V. Debaecker, U. Müller-Wilm, F. Gascon (2017): Sen2Cor for Sentinel-2. – Proceedings SPIE 10427, Image and Signal Processing for Remote Sensing XXIII, 1042704 (4 October 2017). DOI: 10.1117/12.2278218.
Savitzky, A. & M. J. E. Golay (1964): Smoothing and Differentiation of Data by Simplified Least Squares Procedures. – Analytic Chemistry 36 (8), 1627–1639. DOI: 10.1021/ac60214a047.
Das Reporting-Modul befindet sich aktuell in der prototypischen Entwicklung. Ziel ist es, für registrierte landwirtschaftliche Flächen regelmäßige Berichte bereitzustellen, um datenbasierte, fundierte Entscheidungen zur Bewirtschaftung treffen zu können. Es kombiniert Wetterdaten und Fernerkundungsprodukte in einem kompakten Überblick und schafft damit die Grundlage für datengetriebene Entscheidungsprozesse in der Landwirtschaft.
Funktionen im Überblick
1. Auswahl registrierter Flächen
Auf der Startseite des Moduls erscheinen alle registrierten Flächen (z. B. Felder, Schläge).
Wähle eine Fläche durch Antippen aus der Liste aus.
2. Ansehen des aktuellen Berichts
Ein aktueller Bericht enthält zeitlich aufbereitete Daten zu:
🌡️ Wetterdaten:
Temperaturverlauf (Tagesmittel)
tägliche Niederschlagsmenge (in mm)
🌿 Fernerkundungsdaten:
NDVI (Normalized Difference Vegetation Index): Gibt Auskunft über die Vitalität der Vegetation.
Vitalitätsdifferenz: Zeigt die Veränderung im Vegetationszustand im Vergleich zu einer Vorperiode.
3. Interpretation der Daten
Die Wetterdaten helfen dabei, Stressfaktoren wie Hitze oder Trockenperioden zu erkennen.
Die Fernerkundungsdaten unterstützen bei der Einschätzung des Pflanzenwachstums, etwa bei Verzögerung der Entwicklung oder möglichem Schädlings-/Krankheitsdruck.
Hinweise zur Nutzung
Aktuell ist das Modul im Testbetrieb – Berichte werden ggf. nicht regelmäßig automatisch erstellt.
Die angezeigten Werte basieren auf öffentlich zugänglichen Wetterdaten (DWD) und Satellitenbildern (Sentinel-2).
Umfang und Parameter im Bericht werden zukünftig konfigurierbar sein
 Das Bedienelement Positionsbestimmung ist mit einem orangefarbenem Rahmen markiert. Die obenstehende Zahl in dem Bedienelement zeigt die derzeitige geschätzte Ungenauigkeit der Position. Unten links informiert ein farbiger Kreis (in dem Fall grau für die Verwendung des internen GNSS Empfängers) mit zugehörigen Text über die Qualität der Positionsbestimmung. Der Text unten rechts gibt Informationen über die verwendeten
Das Bedienelement Positionsbestimmung ist mit einem orangefarbenem Rahmen markiert. Die obenstehende Zahl in dem Bedienelement zeigt die derzeitige geschätzte Ungenauigkeit der Position. Unten links informiert ein farbiger Kreis (in dem Fall grau für die Verwendung des internen GNSS Empfängers) mit zugehörigen Text über die Qualität der Positionsbestimmung. Der Text unten rechts gibt Informationen über die verwendeten 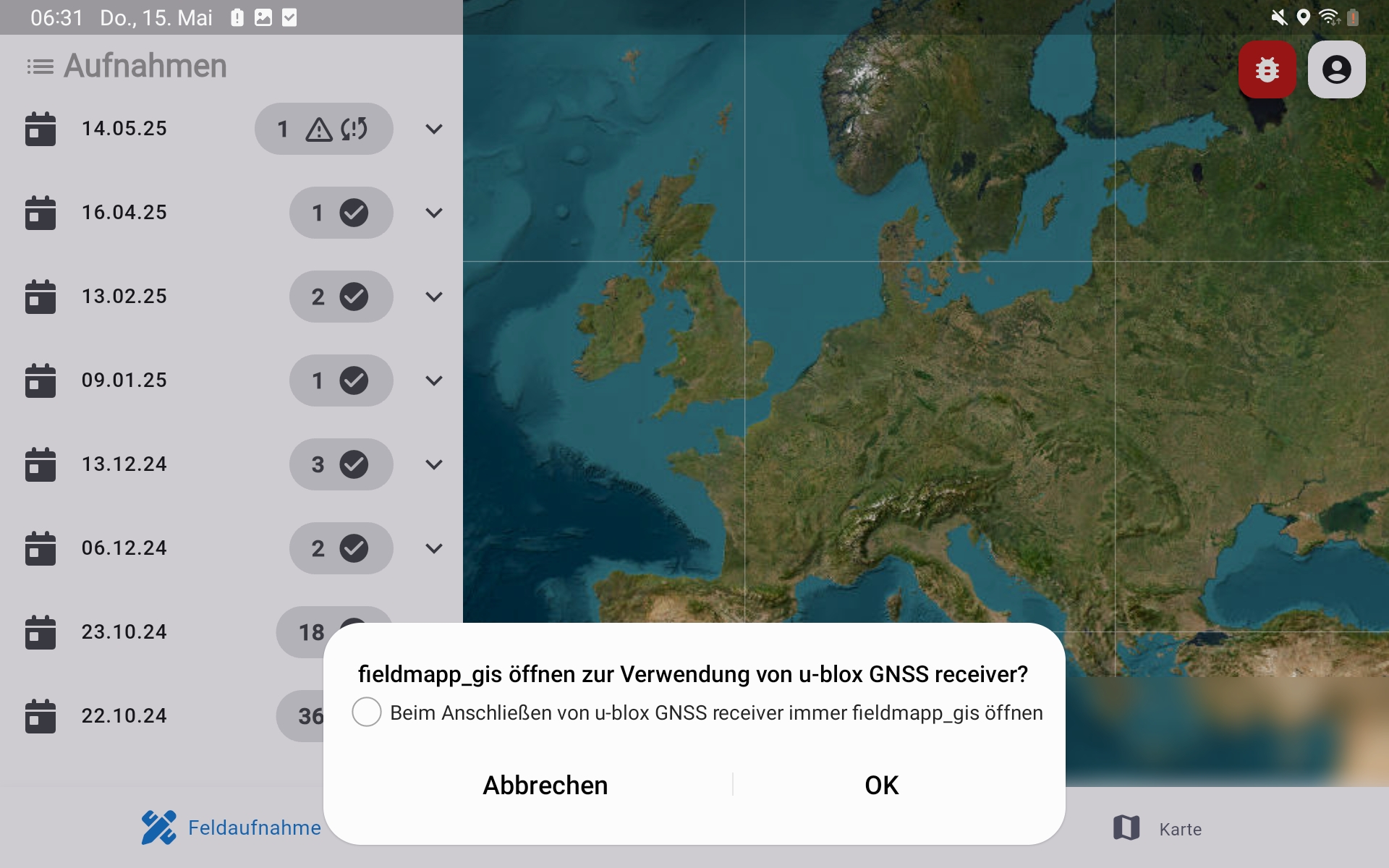 Aufforderung welcher bei Verbinden des GNSS-Empfängers erscheint
Aufforderung welcher bei Verbinden des GNSS-Empfängers erscheint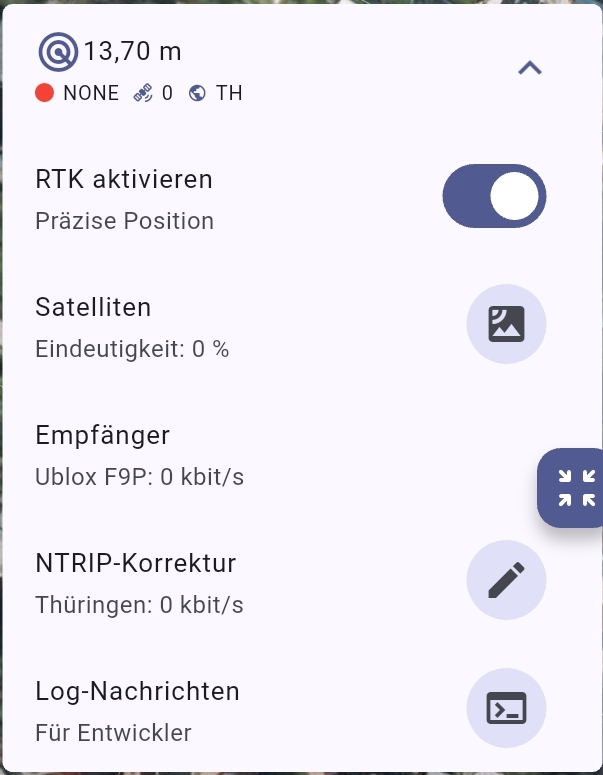
 Startseite des Feldaufnahme Moduls
Startseite des Feldaufnahme Moduls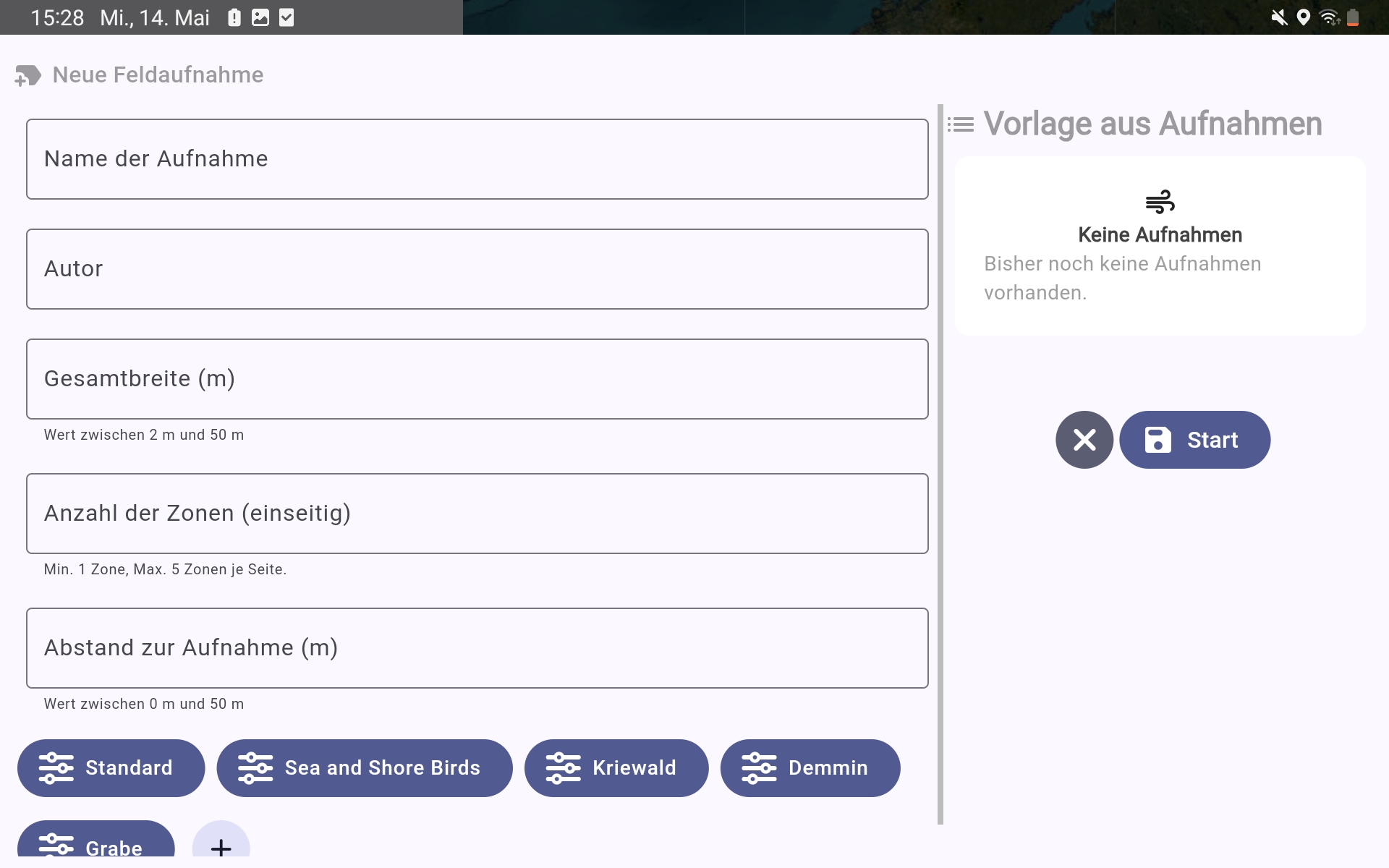 Formular zur Eingabe der Aufnahmeoptionen
Formular zur Eingabe der Aufnahmeoptionen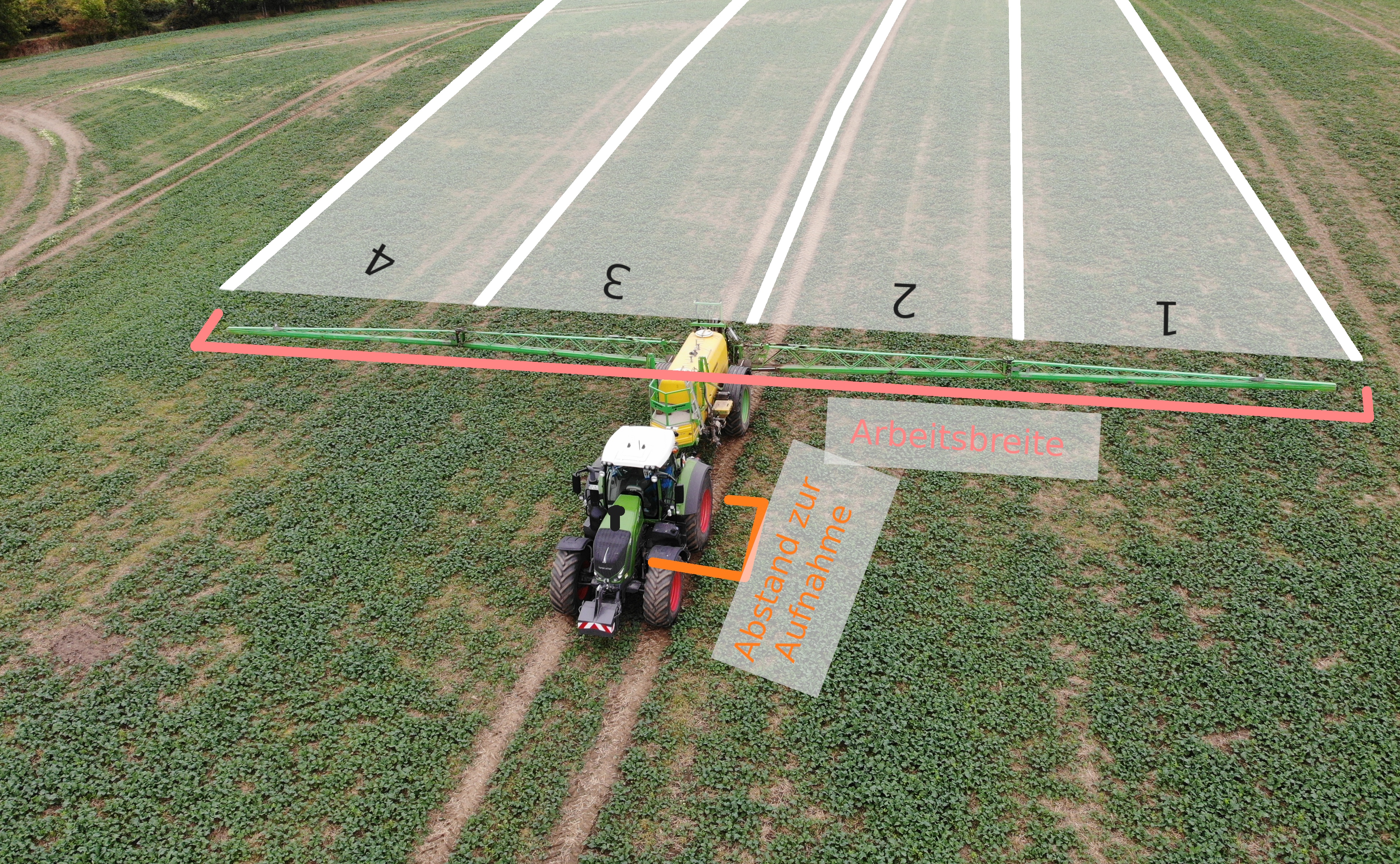 Foto: Maximilian Enderling, Bearbeitung: Tim Surber Diese Grafik zeigt die Bedeutung der Option
Foto: Maximilian Enderling, Bearbeitung: Tim Surber Diese Grafik zeigt die Bedeutung der Option 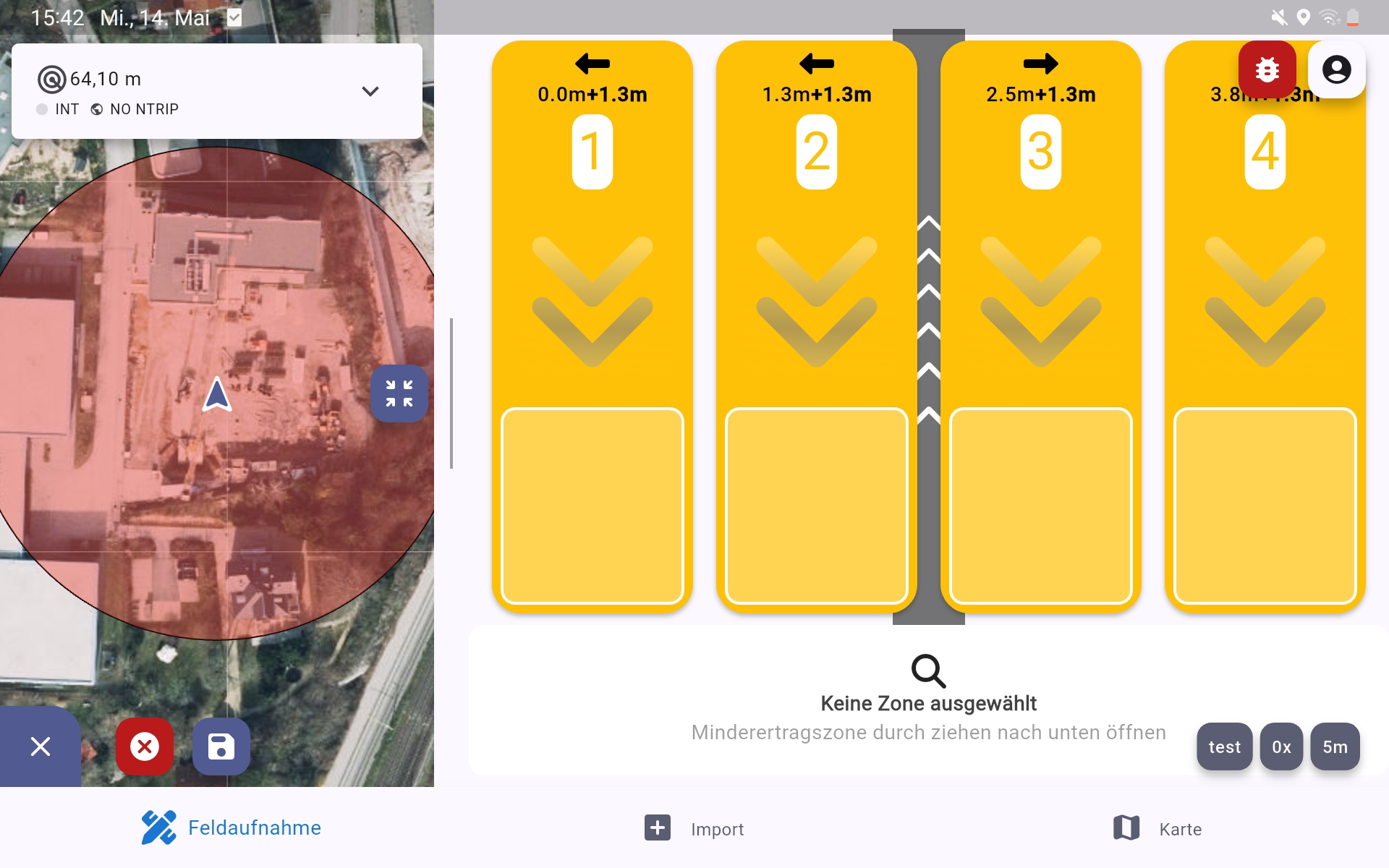 Fahrtansicht während einer Aufnahme
Fahrtansicht während einer Aufnahme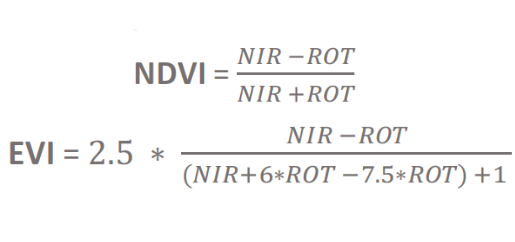
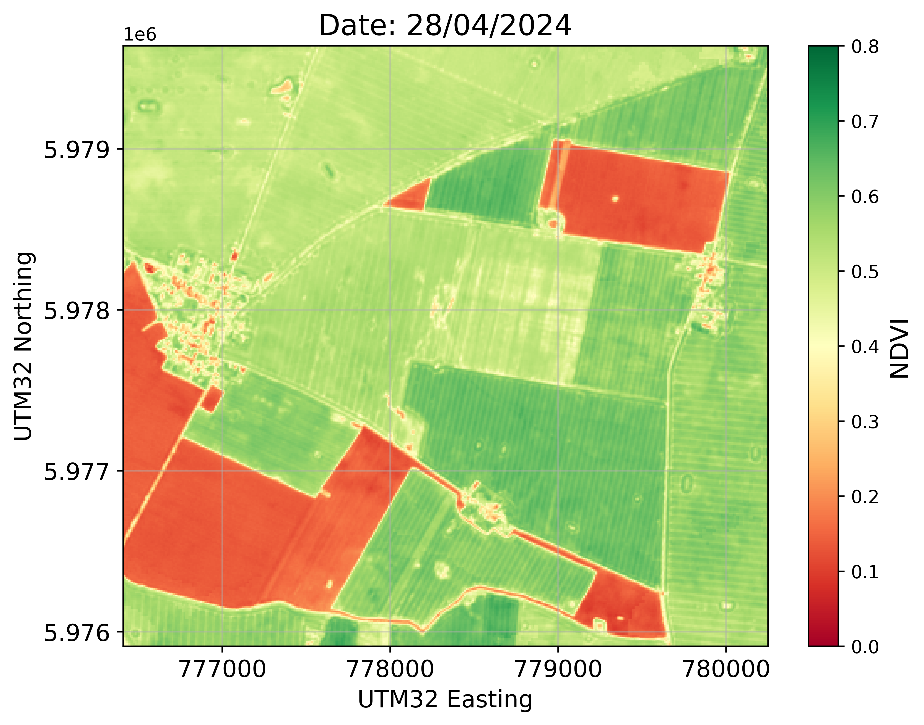 Abbildung 1: Kartenausschnitt für Felder bei Demmin für einen NDVI Layer am 28.04.2024
Abbildung 1: Kartenausschnitt für Felder bei Demmin für einen NDVI Layer am 28.04.2024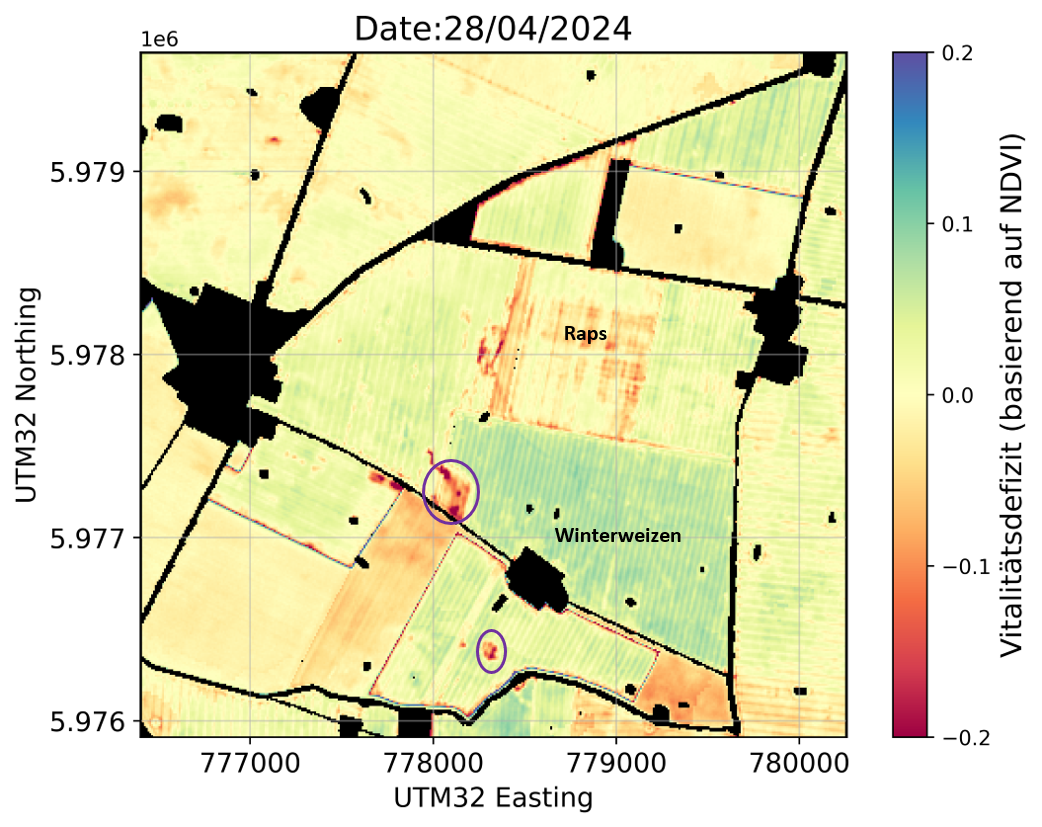 Abbildung 2: Kartenausschnitt für Felder bei Demmin für einen Vitalitätsdefizitlayer am 28.04.2024. Schwarze Bereiche sind nicht-landwirtschaftlich genutzte Flächen (OSM 2025)
Abbildung 2: Kartenausschnitt für Felder bei Demmin für einen Vitalitätsdefizitlayer am 28.04.2024. Schwarze Bereiche sind nicht-landwirtschaftlich genutzte Flächen (OSM 2025)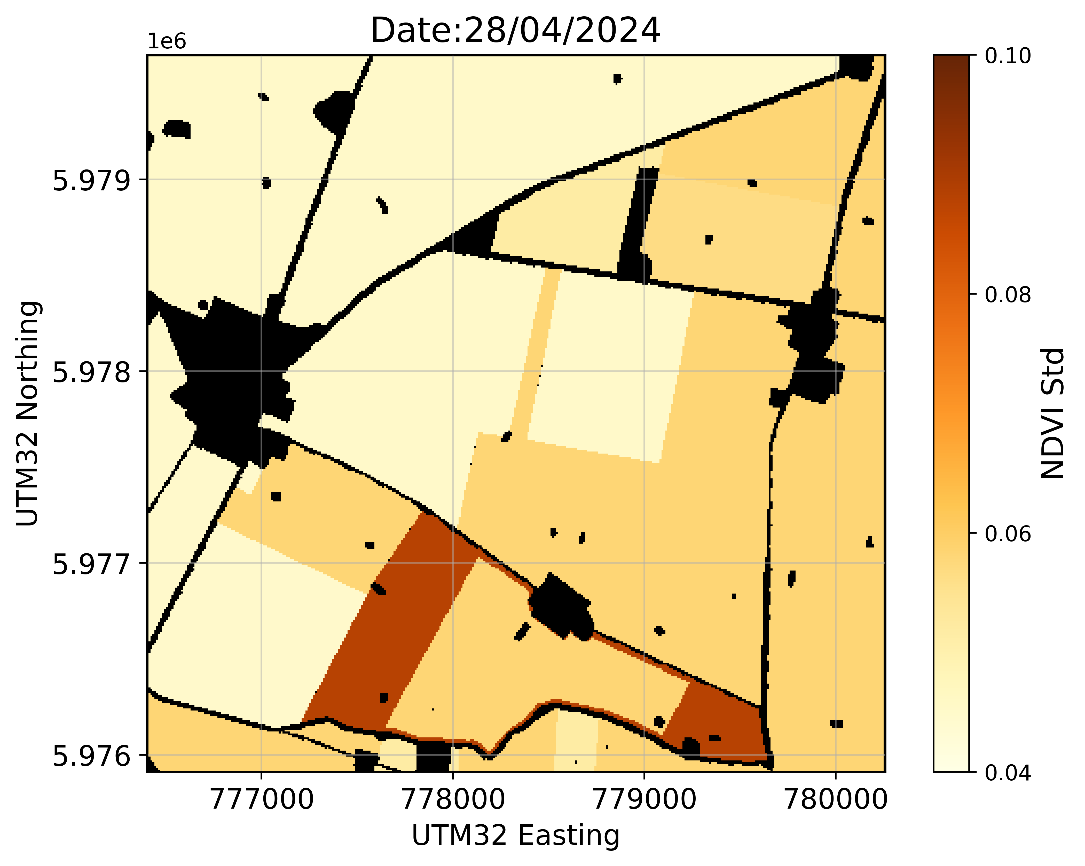 Abbildung 3: Kartenausschnitt für Felder bei Demmin für die feldfruchtspezifische Standardabweichung des NDVI am 28.04.2024. Schwarze Bereiche sind nicht-landwirtschaftlich genutzte Flächen (OSM 2025).
Abbildung 3: Kartenausschnitt für Felder bei Demmin für die feldfruchtspezifische Standardabweichung des NDVI am 28.04.2024. Schwarze Bereiche sind nicht-landwirtschaftlich genutzte Flächen (OSM 2025).